

Neuromorphic camera reveals drones by their spectral signatures
Spotting a tiny drone against a treeline clutter is an operational nightmare. But scientists armed with a camera that mimicks the human retina have found a glaring loophole in electronic stealth

SPOTTING a small drone hovering in front of a windswept treeline is a challenge that defeats even sophisticated surveillance systems. The visual contrast between a small autonomous aerial vehicle and a complex background of rustling foliage can be vanishingly low. Birds, insects and branches all conspire to fool automatic target-recognition pipelines, and in degraded conditions such as fog or poor lighting, conventional approaches degrade further still.
That’s a problem because of rapidly increasing importance of drone detection in situations ranging from military conflicts and critical infrastructure protection to border control and urban airspace management. What governments, the military and security organisations would dearly love is a way to pick out these machines from the natural clutter they are often framed against.
Spectral signature
Enter Megan Birch and colleagues at the Georgia Tech Research Institute in Atlanta who have developed a novel way to pick out a drone or helicopter that would otherwise be hidden against a complex backdrop.
The key insight from Birch and co is that drones produce a crisp periodic signature that can be clearly distinguished from natural scenes that change slowly and continuously over time. These signatures come from mechanical vibrations and, in particular, from rotating blades.
Their idea is that sampling each pixel in a scene at a rapid rate should quickly reveal those mechanical rhythms as a kind of flickering signature. This would be as distinctive as a heartbeat against the relatively, slow changes in the background of trees, birds and other clutter.
It turns out that the equipment capable of this has been developed over the last couple of decades. So-called neuromorphic vision systems are an advanced class of sensing technologies modelled after the biological architecture of the human eye and brain. Unlike traditional frame-based cameras that capture a rapid succession of static, full-image snapshots regardless of scene changes, neuromorphic systems use event-based cameras featuring autonomous pixels that operate independently of each other to report an “event” only when it detects a change in the scene. This filters out static backgrounds while picking out motion.
Birch and co have developed this idea to look for the specific signature of drone rotors spinning at rates of between 50 and 500 Hz. In this way, their framework called FRIES (Frequency Rate Information for Event-Space) can detect and isolate artificial objects, in particular drones, against cluttered natural backgrounds.
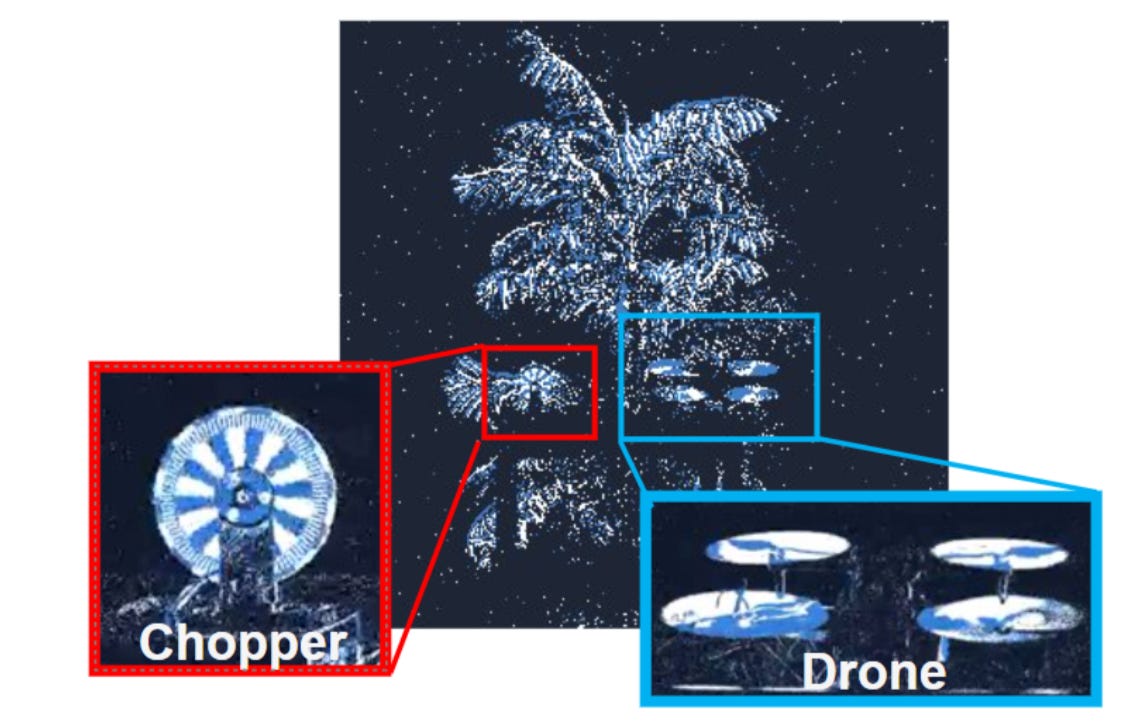
The team tested FRIES using a Prophesee EVK4 event-based camera in two experiments. In the first, a mechanical chopper operating at a known rate and a multi-rotor drone with a dynamic tree behind them were imaged indoors. In the second, a drone hovered against a real treeline in uncontrolled outdoor conditions.
Indoors, the system clearly picked out the fliers. “The key innovation of FRIES is the introduction of a frequency-driven mechanism as a primitive for detection versus reliance on purely spatial or temporal trends,” say Birch and co.
The outdoor results were mixed, however, with the team concluding that the algorithm requires further tuning before deployment. “Event based cameras may prove valuable as a complementary system to conventional frame-based cameras rather than an alternative,” they say, suggesting that the highest performance will come from fusing both sensing modalities.
The team now plan further upgrades such as using parallel filters capable of tracking multiple targets simultaneously.
Ref: arxiv.org/abs/2605.15392: “Frequency-domain Event-based Imaging for Selective Surveillance”
INSIGHT
This paper introduces a fundamentally new approach to detecting mechanical objects — particularly drones — by exploiting their rotational frequency signatures rather than relying on visual contrast or shape. The implications extend well beyond the laboratory.
For airspace security, the ability to isolate a hovering drone against a cluttered treeline addresses one of the most pressing challenges for airports. As drone incursions near airports, prisons and critical infrastructure become increasingly common, these sensors will represent a meaningful operational advance.
For the military, the work paves the way for toward the low-power detection, and potentially identification, of rotary-wing threats without emitting detectable radar signals.
But adversaries are unlikely to give up. The deeper insight is that periodicity itself is the vulnerability — meaning truly stealthy future drones may sacrifice efficiency for deliberate mechanical irregularity, accepting worse flight performance in exchange for spectral anonymity.
The most straightforward countermeasure would be randomising rotor speeds to smear the frequency signature across a broad band, mimicking the incoherent, low-frequency noise of natural background motion like wind-driven foliage. At the software level, onboard flight controllers could actively modulate rotor speeds in patterns that defeat spectral clustering algorithms.
This mirrors the trajectory of radar-absorbing materials in conventional stealth: once the detection physics are understood, evasion becomes an engineering discipline in its own right. Expect a coming battle for spectral camouflage.